
Abstract
An accurate estimate of elapsed time is essential for anticipating the timing of future events. Here, we show that the ability to estimate elapsed time on a reaction time (RT) task improved with training during which human participants learned to anticipate the onset of a “Go” signal. In each trial, a warning signal preceded the Go signal by a temporal interval (i.e., foreperiod). The duration of the foreperiod was randomly drawn from a rectangular distribution (1–2 s). Participants were required to initiate a response immediately after the Go signal and performed the task for 480 trials/day for 12 days. Anticipation should have been governed by the probability that the Go signal would occur (hazard rate), which increased for longer foreperiods. Indeed, RTs decreased for longer foreperiods and were inversely related to the hazard rate. The pattern of RT decrease was well explained by the subjective hazard rate, which was formalized based on the assumption that the uncertainty of estimates of elapsed time scales with time (Weber’s law). Notably, RTs demonstrated a more linear decrease as a function of foreperiod in LATE compared with EARLY training sessions. This involved a decrease in the Weber fraction used in the subjective hazard rate. The results indicate that the uncertainty associated with estimating elapsed time was reduced as participants learned and used the hazard rate to anticipate the onset of the Go signal. This finding suggests that the ability to estimate elapsed time improves with training on behavioral tasks that implicitly engage timing mechanisms.
Similar content being viewed by others
Introduction
The ability to estimate elapsed time is essential for anticipating an upcoming event and preparing an appropriate response. Psychophysical, neurophysiological, imaging, and computational modeling studies have provided many important insights about how animals encode temporal intervals and how the brain represents time (for reviews, see Ivry 1996; Gibbon et al. 1997; Gallistel and Gibbon 2000; Lewis and Miall 2003; Mauk and Buonomano 2004; Buhusi and Meck 2005; Eagleman et al. 2005). However, relatively little is known about how the ability to estimate time intervals in sensorimotor tasks improves with experience.
Psychophysical studies have demonstrated that training improved the ability of humans to discriminate the temporal intervals of auditory, visual, and somatosensory stimuli (Wright et al. 1997; Nagarajan et al. 1998; Westheimer 1999; Karmarkar and Buonomano 2003). Performance variability decreased with training on a temporal interval production task (Bartolo and Merchant 2009). These tasks required participants to estimate interval durations with perceptual discrimination or motor response (Coull and Nobre 2008). To date, training-induced improvements have been shown exclusively on explicit timing tasks. However, it has been unclear whether the ability to estimate elapsed time on implicit timing tasks that do not require an overt estimate of temporal intervals improves with training.
We rely on our sense of time to anticipate future events whenever sensorimotor information is temporally structured (Coull and Nobre 2008). Such anticipation has been extensively examined by reaction time (RT) tasks in which the delay between a warning signal and a “Go” signal (i.e., the foreperiod) was introduced (for a review, see Niemi and Näätänen 1981). If a Go signal is likely to occur with equal probability after one of many possible foreperiods, the conditional probability that the Go signal will occur, given that it has not already occurred, increases over time (Elithorn and Lawrence 1955). This computation is often referred to as the hazard rate (Luce 1986; Nobre et al. 2007). Reaction times are faster after longer foreperiods, paralleling increasing hazard rates (Klemmer 1956; Karlin 1959; Drazin 1961; Requin and Granjon 1969; Riehle et al. 1997). This implies that the brain represents both the passage of time and the time-dependent probability that the Go signal will occur (Janssen and Shadlen 2005; Cui et al. 2009). Thus, timing mechanisms are engaged implicitly in the RT tasks.
Electroencephalographic studies in humans have demonstrated sensitivity to the temporal information processing of the contingent negative variation (CNV), a slow negative wave that develops during the interval between two events (Walter et al. 1964). Latency and amplitude measures of the CNV have been correlated with the reproduced duration (Ruchkin et al. 1977) and the estimated duration of a stimulus (Macar et al. 1999). Furthermore, the amplitude of the CNV has also reflected the anticipation of a given event during RT tasks (Loveless 1973; Trillenberg et al. 2000; Praamstra et al. 2006). In monkeys, neurons in the posterior parietal cortex and the presupplementary motor area showed increasing activity (for climbing activity, see Durstewitz 2003; Reutimann et al. 2004) during time discrimination and production tasks (Leon and Shadlen 2003; Mita et al. 2009). Moreover, neurons in various brain areas modulated their activities in anticipation of an event (Niki and Watanabe 1979; Mauritz and Wise 1986; Komura et al. 2001; Brody et al. 2003; Janssen and Shadlen 2005). These neurophysiological studies indicate that explicit and implicit timing relies on qualitatively similar timing mechanisms even if they are implemented in distinct neural substrates.
Based on these behavioral and neurophysiological observations, we investigated whether training on a RT task would lead to an improvement in timing, as observed in training on explicit timing tasks. Human participants were required to initiate a response as soon as possible after a Go signal. The same rectangular distribution of the foreperiod was used throughout the training. We reasoned that training would allow participants to anticipate the onset of the Go signal and examined how anticipation during the RT task affected the ability to estimate elapsed time.
Materials and methods
Participants
Seven adults (six men, one women; age, 33 ± 6 years) participated in the experiment, provided written informed consent, and were paid for their time. All participants were right-handed according to the Edinburgh handedness questionnaire (Oldfield 1971), with normal or corrected-to-normal visual acuity and no significant neurological history. There was no expertise on music, sports, or video games in the participant. All experimental protocols conformed to the guidelines of the Declaration of Helsinki and were approved by the Ethics Committee of Tokyo Metropolitan Institute for Neuroscience.
Experimental setup
Each participant sat in a chair in a quiet room with their right forearm supported in a neutral position, midway between full pronation and full supination. The participant grasped the handle of a lightweight, low-friction manipulandum (e.g., Fig. 1 in Hoffman and Strick 1986). The handle of the manipulandum rotated along horizontal and vertical axes. Two potentiometers measured wrist angle in the flexion–extension (vertical) and radial–ulnar (horizontal) planes. A PC-based real-time experimental control system (TEMPO; Reflective Computing, St. Louis, MO) was used for stimulus presentation and data collection. Visual stimuli were presented on a 17-inch computer monitor (RDS173X; MITSUBISHI, Tokyo, Japan; refresh rate, 60 Hz). A participant sat ~70 cm in front of the monitor that displayed a cursor and targets. The cursor was a ~3 × 3 mm square that moved in the same direction as the wrist (i.e., upward movement of the manipulandum was associated with upward displacement of the cursor and rightward movement of the manipulandum was associated with rightward displacement of the cursor). One degree of wrist movement moved the cursor 4 mm on the screen. The target was an open square, the inside diameter of which equaled 7° of wrist movement.

Experimental methods. a Rectangular probability distribution of the foreperiod. The interval between a warning and Go signals (foreperiod) varied randomly from 1 to 2 s across trials. The probabilistic distribution was fixed throughout training. Participants were required to initiate a response as quickly as possible after the Go signal. b Hazard rate of the Go signal. Hazard rate is the conditional probability that the Go signal will occur given that it has not yet occurred and increases hyperbolically with longer foreperiods. c Distribution of the estimate of elapsed time. Scalar timing or Weber’s law for time denotes that the standard deviation of the normal distribution is proportional to elapsed time. The coefficient of variation (ϕ = σ/μ) is a Weber fraction for time estimation (ϕ = 0.25, as an example). d Probability distribution was blurred on the assumption that time estimation obeys Weber’s law. Solid line represents the blurred probability distribution. Dashed line represents the probability distribution of the foreperiod used in the reaction time (RT) task. e Subjective hazard rates were calculated according to the blurred probability distribution. The time course of the subjective hazard rate (solid line) differs from that of the theoretical hazard rate (dashed line) in which the Weber fraction is set to zero. f Two examples of RT. The data show the same amount of RT decrease with different curves between foreperiods of 1.0 and 2.0 s. Reaction time represented by a dashed line decreases gradually for shorter foreperiods and rapidly for longer foreperiods. Reaction time represented by a solid line decreases gradually for longer foreperiods. Fitting the subjective hazard rate to each data would reveal the coefficient, w r , to be the same and the Weber fraction to be smaller for a dashed line than a solid line
Behavioral paradigm
Participants were required to perform a step-tracking task equivalent to those used in previous human and nonhuman primate studies (Hoffman and Strick 1986, 1999; Kakei et al. 1999). To initiate the “center-out” trial, a participant placed the cursor inside the central target, which was positioned at the center of the screen. Correct placement of the cursor corresponded to a neutral wrist position. After a variable hold period (0.8–1.2 s), a target appeared (i.e., warning signal) at one of eight peripheral locations evenly distributed at 45° angles, 8 cm from the central target. The participant was required to maintain his/her initial wrist position until the central target disappeared (Go signal) and was instructed to make a wrist movement to place the cursor inside the peripheral target as quickly as possible after onset of the Go signal. Acquiring the target required a 20° change in wrist angle. The duration of the foreperiod was a random variable drawn from a rectangular distribution (Fig. 1a), the function of which was:
The variable t represented time relative to the warning signal. The wrist movement was required to be initiated ≤500 ms from the onset of the Go signal and had to be completed ≤400 ms from movement onset. If those criteria were not met, the trial was immediately aborted, notifying the participant that the movement was too slow. Likewise, if movement was initiated prior to the onset of the Go signal, the trial was aborted, notifying the participant that the response was premature. Once the cursor was positioned in the peripheral target, the participant had to maintain his/her wrist angle for 400 ms to complete the center-out trial. The completion of a trial was signaled by a tone. Following a 1-s intertrial interval, a “return” trial began, which required the participant to return the cursor to the central target, once again assuming a neutral wrist position. After a variable hold period, the central target appeared as the warning signal. At the end of the foreperiod, the peripheral target disappeared, serving as the Go signal. After the participant completed the return trial, a new center-out trial began. If a participant failed to complete a center-out or return trial successfully, the trial was reinitiated in which the duration of the foreperiod was different from that used on the error trial.
We used a movement precuing technique (Rosenbaum 1980), in which the warning signal provided information about upcoming movement (e.g., direction and extent) prior to the onset of the Go signal. In our RT task, the participants knew what movement they had to perform prior to the Go signal. In other words, the participants did not need to specify a particular movement among possible ones based on the Go signal. After the onset of the warning signal, it remains uncertain when the Go signal will occur. Thus, our RT task could be considered to be comparable to simple RT tasks (Luce 1986).
A block of trials consisted of 80 center-out trials (10 trials for each of the eight peripheral targets) and 80 return trials. The target location in center-out trials was randomized across trials. Participants performed three blocks of trials (total 480 trials) each day for 12 days (~1 h/day). Training was conducted for five consecutive week days. The amount of training was comparable to that given in previous human learning studies (Wright et al. 1997; Nagarajan et al. 1998; Karmarkar and Buonomano 2003; Bartolo and Merchant 2009). The probability density function of the foreperiod was held constant throughout training. During the first day of training, participants became familiar with using the manipulandum. Training Days 2–3 were considered “EARLY” sessions, and Days 11–12 were considered “LATE” sessions.
Data collection and analysis
Wrist angle data were sampled at 1 kHz, digitized, and stored. The data were analyzed online and offline using MATLAB (The MathWorks Inc., Natick, MA). To determine velocity and acceleration, horizontal (x) and vertical (y) signals of wrist angle were digitally differentiated, filtered with a two-pole, 100-Hz low-pass Butterworth filter, and combined (velocity = √ (dx/dt)2 + (dy/dt)2, acceleration = √ (d2 x/dt 2)2 + (d2 y/dt 2)2). Trial-by-trial traces of wrist position and velocity were displayed online in order for the experimenter to visually verify that the participant executed the movement correctly. For each trial, the start of a movement was defined as the time that the velocity exceeded a threshold of 15 degree/s (~8% of peak velocity) (Yamamoto et al. 2006). Reaction time was the interval from the Go signal to the movement onset. We examined whether our method of detecting movement onset affected study outcomes by estimating RT according to two different criteria: In the first case, movement onset was defined as the time that velocity exceeded 10% of peak velocity obtained during the trial, which took into account the variability of movement speed across trials (Gorbet and Sergio 2009). In the second case, movement onset was defined as the time that wrist position exceeded a fixed deviation from the average position in the final 300 ms before the onset of the Go signal. We found that outcomes were not sensitive to the methods used to detect movement onset. Responses for which the RT was ≤80 ms were considered too short to have been initiated in response to the Go signal (Fischer and Rogal 1986) and were excluded from analysis. Velocity and acceleration profiles of each trial were verified by visual inspection. We analyzed RT data from center-out trials, in which the wrist position during the foreperiod was consistent. A two-way repeated measures ANOVA of RT with the factors movement direction and training demonstrated no significant interaction for any participants (P > 0.05). Thus, variability in RT due to movement direction did not change with training. We collapsed RT data across target direction to optimize the amount of data analyzed. The RT data of return trials were not analyzed further, as wrist position during the foreperiod differed depending on the location of the peripheral target.
Ideally, anticipation of the onset of the Go signal is governed by the hazard rate. That is, the probability that the Go signal will occur at time t divided by the probability that it has not yet occurred:
where F(t) is the cumulative distribution, \( \int_{0}^{t} {f(s){\text{d}}s} \) (Fig. 1b). In the rectangular foreperiod, the hazard rate monotonically increases with longer foreperiods.
It is generally accepted that the experience of elapsed time carries a degree of uncertainty that scales with the interval of time that has passed (Weber’s law for time estimation, Gibbon 1977). This uncertainty implies that, in RT tasks, the distribution of foreperiods that a participant experiences during training is a distorted version of the actual probability distribution. Based on this notion, we calculated a blurred version of the hazard rate (subjective hazard rate, Janssen and Shadlen 2005; Tsunoda and Kakei 2008) by taking into account the scalar property of time estimation. The probability distribution f(t) was first blurred by a normal distribution whose standard deviation was proportional to elapsed time (Fig. 1c).
The coefficient of variation ϕ was a Weber fraction for time estimation. Equation (3) was based on the idea that a participant’s estimate of elapsed time carries uncertainty. Thus, an event at objective time t 0 was perceived as occurring at t 0 ± σ (σ = ϕ t 0). Figure 1c exemplifies the time estimation distributions for a Weber fraction of 0.25. The standard deviation increases with elapsed time. Figure 1d represents the calculated \( \tilde{f}\left( t \right) \) by substituting the Weber fraction in Eq. (3).
Subjective hazard rate was obtained by substituting \( \tilde{f}\left( t \right) \) and its definite integral \( \tilde{F}\left( t \right) \) in Eq. (2) (Fig. 1e). That is:
The time course of the subjective hazard rate was influenced by the Weber fraction. As the Weber fraction becomes small, increases in the subjective hazard rate for longer foreperiods become large. For example, when the Weber fraction equals zero, the subjective hazard rate corresponds to the theoretical hazard rate, which increases rapidly for longer foreperiods (Fig. 1b, e). In contrast, as the Weber fraction increases, the increase in the subjective hazard rate for longer foreperiods is more gradual (Fig. 1e).
We calculated mean RT of successive 50-ms intervals in the 1- to 2-s foreperiods in both EARLY and LATE sessions. To quantify the relationship between subjective hazard rate and RT, we fitted the RT curve, using the subjective hazard rate:
where w e was a constant term, and w r was the coefficient for the subjective hazard rate, delayed by time shift τ. We set τ at 60 ms based on previous studies (see below; Janssen and Shadlen 2005; Tsunoda and Kakei 2008). ε represented noise, which was assumed to be Gaussian, with uncertainty derived from the sample means. For ease of interpretation, the subjective hazard rate was scaled by its value at the foreperiod of 2 s so that the rate ranged from 0 to 1. Accordingly, the coefficient w r can be interpreted as the magnitude of RT modulation attributed to the theoretical waveform in units of milliseconds per unit anticipation. The coefficient depends on the differences in RT between foreperiods 1.0 and 2.0 s (Fig. 1f).
We used a maximum-likelihood fitting procedure to obtain the fits, parameter estimates, and their standard errors. For each participant, the log likelihood function was defined as follows:
where n indicates the number of data obtained from the participant. To maximize the log likelihood, we need to take the partial derivative of l(w e , w r , ϕ) with respect to each of parameter. Then, we need to solve simultaneous equations in which the partial derivatives are set to zero. It was quite difficult to solve the equations analytically. To overcome the problem, the Weber fraction was regarded as a constant. This enabled us to solve analytically the simultaneous equations and then obtain parameter estimates.
in which \( \overline{\text{RT}} \) and \( \overline{S} \) were sample means. Standard errors of parameters were estimated from the Hessian matrix of second partial derivatives of the log likelihood and were used to generate t statistics.
The fitting procedure was repeated with varying the Weber fraction between 0.1 and 0.6 in 0.01 step in which the subjective hazard rate had different curves. We calculated the coefficient of determination (R 2) as the fraction of variance of mean RT explained by the fit. This yielded fifty-one fits or R 2 s related to different ϕ (Fig. 3b). We referred to ϕ that provided the best fit (the largest value of R 2) as estimate of the Weber fraction. In this procedure, we could not estimate the standard error of the Weber fraction. We fit the RT from each participant and each training session independently to obtain the Weber fraction. Therefore, the fitting procedure allowed us to assess the ability to estimate elapsed time based on RT data. We tested statistical significance of the fitted parameters and the Weber fraction obtained in EARLY and LATE sessions using the Wilcoxon matched-pairs signed-ranks test.
It has been demonstrated that monkeys’ RT in saccadic eye movement and wrist movement tasks is inversely related to and well fitted by a weighted sum of the subjective hazard rate (Janssen and Shadlen 2005; Tsunoda and Kakei 2008). The fitting procedure (Eq. 5) determines the time course of the subjective hazard rate, which inversely matches the RT. For example, if RT decreases gradually for shorter foreperiods and rapidly for longer foreperiods (Fig. 1f, dashed line), the data would be better fit by the subjective hazard rate for which increases become steep for longer foreperiods. In contrast, if RT decreases gradually for longer foreperiods (Fig. 1f, solid line), the data would be better fit by the subjective hazard rate for which increases are gradual for longer foreperiods. The Weber fraction is estimated to be smaller in the former case. In summary, the fitting procedure would estimate the weight w r as similar, but the Weber fraction as different, for two RT data showing the same amount of reduction between foreperiods 1.0 and 2.0 s, but having different curves (Fig. 1f).
We considered the possibility that the time delay τ in Eq. (5) changed with training. Although we varied τ from 20 to 80 ms, it had little influence on the goodness of fit; R 2 changed only on the order of ≥3 digits after the decimal point. Although training might influence τ, the fitting procedure could not estimate it. Therefore, we used a fixed τ based on previous studies.
Participants’ movements during training Day 1 varied across trials, and RT for different foreperiods varied widely. We verified offline that velocity profiles at Day 1 had larger variability than those at Days 2–3. We estimated the Weber fraction based on the data obtained during training Day 1. However, for some participants, the Weber fraction exceeded 0.6 and did not converge in the fitting procedure. Therefore, we did not further analyze Day 1 data. Excluding those data did not influence the outcome of the study or our ability to evaluate the effect of training on temporal processing ability.
We examined whether premature responses influenced outcomes. The proportion of premature responses was 2.6 ± 1.8% (mean ± SD, for all participants) and 3.7 ± 3.0% for EARLY and LATE sessions, respectively. Of these, >90% occurred on trials with longer foreperiods (1.8–2.0 s). As a result, RTs showed a slightly larger decrease for long foreperiods, compared with those obtained when premature responses were excluded. However, outcomes were not influenced by the inclusion or exclusion of premature responses.
Results
Participants initiated wrist movements after the Go signal on nearly all trials in both EARLY and LATE training sessions. Typically, the velocity profile of movements was bell-shaped and unimodal, with a steep acceleration phase to peak velocity; and movements were completed within ~200 ms (Fig. 2a, for Participants P1 and P3, black thin lines). In a small fraction of trials, the participants made premature responses (Fig. 2a, gray thick lines). The distribution of response latencies indicated that such premature responses were rare for each EARLY and LATE session (Fig. 2b, and see Materials and methods). Premature responses were excluded from further analysis. We analyzed RT data from a total of 3,173 and 3,190 trials for EARLY and LATE training sessions, respectively.

Velocity profiles and latency distributions of movements of participants P1 (left panel) and P3 (right panel). a Examples of velocity profiles in a block of LATE session trials. The onset of the movement is marked by triangles. Velocity profiles were sorted by latency of responses. Dashed vertical lines represent 80 ms from the Go signal used for the identification of regular or premature response. Thick gray lines represent responses categorized as premature. Thin black lines represent standard responses. Vertical bar at the right top in each panel represents a velocity of 100 degree/s. b Distributions of response latency in EARLY (gray area) and LATE (black area) sessions. Dark gray area represents the overlap between the distributions of EARLY and LATE sessions
Effect of foreperiod duration on reaction time
Reaction time showed a clear dependence on the duration of the foreperiod and decreased with longer foreperiods in EARLY and LATE training sessions, for P1 and P3, respectively (regression analysis, P < 0.001) (Fig. 3a). For the other five participants (P2, P4, P5, P6, P7), RT decreased with longer foreperiods in both EARLY and LATE sessions (P < 0.001).

Reaction time data from participants P1 (upper row) and P3 (lower row). Red denotes EARLY sessions and blue denotes LATE sessions. a Mean RT was plotted as a function of foreperiod (P1: 446 trials in EARLY session and 458 trials in LATE session; P3: 465 trials in EARLY session and 457 trials in LATE session). Points represent means of RT for 20 consecutive 50-ms foreperiods. Curves represent fit to the data from EARLY and LATE sessions, respectively, using a weighted sum of the subjective hazard rate. Error bars are ±1 standard error of the mean. b Coefficient of determination (R 2) for the fits. R 2 describes the fraction of the running mean variance that is explained by the fit. Because the time course of the subjective hazard rate varied with the Weber fraction, the fit resulted in a different R 2 value. We determined the Weber fraction that gave the best fit in EARLY and LATE sessions. For example, for participant P1, R 2 was maximum by 0.87 when the Weber fraction was 0.35 in EARLY sessions. In LATE sessions, R 2 was maximum by 0.89 when the Weber fraction was 0.19
Reaction time was inversely related to the subjective hazard rate. For EARLY and LATE training sessions, the data were well fit by the subjective hazard rate (Fig. 3a, Eq. (5)). The coefficients for subjective hazard rates, w r , for participant P1 were −59.1 and −43.8 for EARLY and LATE sessions, respectively; for participant P3, the corresponding values were −45.1 and −30.9 and were negative for all participants in both EARLY and LATE sessions (see Table 1 for all participants).
Effect of training on ability to estimate elapsed time
The RT curves show that training affected the pattern of decreases in RT (Fig. 3a). The magnitude of the decrease for longer foreperiods appeared smaller in the EARLY sessions compared with LATE sessions, for which the decreases in RT seemed more consistent for short and long foreperiods (i.e., a more linear decrease for increasing foreperiod). The coefficient of the subjective rate, w r , increased significantly with training (P = 0.028, Wilcoxon signed-rank test). The constant term w e decreased significantly with training (Table 1, P = 0.018, Wilcoxon signed-rank test).
From each participant, we estimated the Weber fraction in each of EARLY and LATE session using the fit described above. Figure 3b represents the value of R 2 when the Weber fraction varied from 0.1 to 0.45. Estimated ϕ was the Weber fraction that gave the best fit. In general, the value of R 2 started to rise with a small ϕ, reached a peak, and then decreased as ϕ increased. For participant P1, the estimates of ϕ for EARLY and LATE sessions were 0.35 and 0.19, respectively; the corresponding values for participant P3 were 0.31 and 0.24 (for other participants, see Table 2). The mean ± SD Weber fraction for all participants in EARLY and LATE sessions was 0.31 ± 0.02 and 0.23 ± 0.04, respectively, and decreased with training (P = 0.018, Wilcoxon signed-rank test). We also estimated the Weber fraction in the middle of training (i.e., Days 6–7). The mean ± SD Weber fraction for all participants was 0.26 ± 0.02. The Weber fraction decreased throughout training (P = 0.0024, Friedman test). There was not a significant correlation between the training-induced changes in the Weber fraction and coefficient w r (Pearson’s correlation coefficient r = 0.162, P = 0.74).
We averaged RT across EARLY and LATE sessions for all participants (Fig. 4). There was a significant decrease in RT with training and foreperiod (two-way ANOVA main effects by training: F[1, 240] = 10.11, P = 0.0017; by foreperiod: F[19, 240] = 5.48; P < 0.0001). We calculated mean subjective hazard rates for all participants in each EARLY and LATE session. The function was well fit to the data (EARLY R 2 = 0.98, LATE R 2 = 0.96).

RT averaged for all participants. Red represents EARLY sessions and blue represents LATE sessions. Each curve represents the subjective hazard rate fit to data. The parameters and the Weber fraction used for the fits were the mean for all subjects
Effect of training on the velocity of wrist movement
Because RT, or the onset of the movement, was determined by the velocity of the wrist movement, it could be considered that decreases in RT were due to changes in velocity profile at the time of movement onset. Therefore, we examined whether movement velocity varied with foreperiod. The foreperiod was divided into five equal time intervals (1.0–1.2, 1.2–1.4, 1.4–1.6, 1.6–1.8, and 1.8–2.0 s). Movement velocity was grouped according to the foreperiod intervals. For EARLY and LATE sessions, the mean velocity profiles of all participants overlapped to a great degree from the onset to the end of the movement during all five intervals (Fig. 5a). Next, we examined whether training affected movement velocity. The velocity profiles of all participants for EARLY and LATE sessions were compared between corresponding foreperiod intervals. For all foreperiod intervals, the initial part of the wrist movement (~50 ms from movement onset during which movement accelerated) overlapped (Fig. 5b). Velocity profiles showed changes in the intervals, which would not affect the detection of movement onset. Peak velocity significantly increased with training by 20.22 ± 24.4 degree/s averaged for all participants (P = 0.028, Wilcoxon signed-rank test). Time to peak velocity measured from movement onset slightly decreased with training by 7.6 ± 9.2 ms averaged for all participants, but the decrease was not significant (P = 0.063, Wilcoxon signed-rank test). Thus, changes in velocity profiles did not account for changes in RT.

Velocity profiles of wrist movement averaged for all participants. Line property is at top. The foreperiod was divided into five 200-ms intervals. Wrist movements were sorted according to the foreperiod interval and training sessions. a Velocity profiles of the shortest and longest foreperiods were compared. The profiles overlapped to a great degree from initiation to completion of wrist movements for EARLY (left panel) and LATE (right panel) sessions. b Velocity profiles for EARLY and LATE sessions were compared. The initial part of wrist movements (~50 ms from movement onset) overlapped in the shortest (left panel) and longest (right) foreperiod intervals
Discussion
The present study demonstrated that training on a RT task improved the ability to estimate elapsed time. Participants were asked to initiate a response as soon as possible after a Go signal, which was preceded by a foreperiod whose duration was randomly drawn from a rectangular distribution. The time course of anticipation was formalized by the hazard rate, which increased the longer the participant waited for the Go signal.
The RTs decreased for longer foreperiods. The pattern of RT decrease was well explained by the subjective hazard rate, which considered the uncertainty involved in the estimation of elapsed time. This implies that participants estimated the elapsed time to anticipate the onset of the Go signal. Thus, timing mechanisms were engaged to achieve the goal of the task.
We also showed that the patterns of RT decrease changed with training, suggesting that training affected the time course of anticipation. Indeed, the fitting procedure revealed that the coefficient of the subjective hazard rate, the constant term, and the Weber fraction were modulated by training. Notably, the Weber fraction decreased with training, indicating that the uncertainty associated with estimating elapsed time was reduced with training. Taken together, our results suggest that participant’s ability to estimate elapsed time improved as they learned to anticipate the onset of the Go signal. Previous studies have shown improved timing in explicit timing tasks with training. Our results extend these results by showing that timing in an implicit timing task improved with training.
Comparison with previous reaction time studies
The inverse relationship between foreperiod and RT that we observed is consistent with the “foreperiod effect” (Niemi and Näätänen 1981). Previous studies have demonstrated that training on a RT task influences the pattern of decrease in RT (Requin and Granjon 1969; Näätänen and Merisalo 1977; MacDonald and Meck 2006). Näätänen and Merisalo (1977) used three different rectangular distributions, each of which had three different foreperiods (2.5, 3.0, or 3.5 s; 2.0, 3.0, or 4.0 s; 1.0, 3.0, or 5.0 s). They demonstrated that when participants were inexperienced on the task, RT for each distribution was longest for shortest foreperiods, decreased for medium-duration foreperiods, and then increased slightly for the longest foreperiods. As participants became more familiar with the task, RT consistently decreased as foreperiod increased. The changes in RTs were comparable to those in the present study. Although previous studies have not examined change in behavioral performance in terms of temporal processing, comparable change across studies indicates that improvement in timing might also be induced with experience on previous RT tasks in which foreperiod distributions were different from those in the present study.
Previous studies showed that the amount of RT decrease between the shortest and longest foreperiods became small with training. Thus, it appears that training reduced the sensitivity of the RT to the foreperiod (Näätänen and Merisalo 1977). Similar training effects were reported by MacDonald and Meck (2006), who showed that RT decreased between 1–2 and 2–3 s foreperiods in early training. The RT decrease became smaller as training progressed, suggesting that the foreperiod effect on RT diminished with training (MacDonald and Meck 2006). The present results are consistent with those observations. The coefficient of the subjective hazard rate fitted to the RT, which was negative, increased with training, indicating that the inverse relationship between foreperiod and RT weakened with training. Further, the constant term for the fit decreased with training. The results suggest that training could affect strategies used by the participants. The participants might increase overall response speed at the expense of the foreperiod effect so as not to raise the rate of premature responses. In other words, training might optimize the speed–accuracy trade-off in RT.
In studies employing variable foreperiods with catch trials (i.e., when the Go signal does not occur over the trial), RTs decrease initially toward a minimum, which occurs middle to middle-last portion of the foreperiod, and then increase for longer foreperiods (Drazin 1961; Polzella et al. 1989; Oswal et al. 2007). In the catch trial condition, the participants become increasingly uncertain whether the Go signal will occur or not, as foreperiod increases. If the total probability of the Go signal is less than 1, then the hazard rate has to decline at long foreperiods. If the participants really know that the Go signal does not occur beyond a certain foreperiod, then the hazard rate has to go to 0 even though the survivor function never declined to 0. The subjective hazard rate applies as well if we assume the scalar variability in estimating elapsed time. The decline in the subjective hazard rate at longer foreperiods could explain the increase in the RT occurring late portion of the foreperiod.
Comparison with previous temporal learning studies
In this study, the Weber fraction decreased from 0.31 to 0.23 (26%) with training. Previous human studies have reported that discrimination of temporal intervals between sensory stimuli improves with training (Wright et al. 1997; Nagarajan et al. 1998; Westheimer 1999; Karmarkar and Buonomano 2003). For example, Wright et al. (1997) trained participants to discriminate a standard interval of 100 ms bound by tones. The threshold for discriminating the standard interval from longer intervals decreased with training. The discrimination threshold changed by 48% (from a Weber fraction of 0.21–0.11) for an auditory interval of 100 ms (Wright et al. 1997) and by 42% (0.28–0.16) and 63% (0.49–0.18) for somatosensory intervals of 125 and 75 ms, respectively (Nagarajan et al. 1998). Training on an interval production task (Bartolo and Merchant 2009) demonstrated that the standard deviation of the produced interval decreased from 37 to 21 ms for a 450-ms standard interval (in ratio: from 0.09 to 0.05, visual inspection of their supplementary Fig. 1). Standard deviations of the produced interval decreased by 44 and 50% for 450- and 850-ms standard intervals, respectively. The magnitude of the improvement was smaller in the present study compared with previous studies. Time discrimination and production tasks require participants to provide an overt estimate of stimulus or response duration. In contrast, the RT task requires no overt estimates of duration. The difference in task requirements might affect the magnitude of improvement. Furthermore, the duration of the temporal intervals that the participants had to estimate was longer in our study than in previous studies, and the uncertainty in estimating elapsed time was larger. These factors might also degrade the improved ability to estimate elapsed time.
Behavioral studies have suggested the distinction between explicit and implicit timing. Zelaznik et al. (2002) reported that performance on timing tasks in which the temporal representation is explicit, such as duration discrimination, tapping, and intermittent circle-drawing tasks, was correlated. However, the correlation was weaker or absent between these tasks and a continuous circle-drawing task in which temporal control is an emergent property (i.e., implicit timing). Further, by using a dimensional analysis, Merchant et al. (2008) showed a prominent segregation of performance variability between explicit and implicit timing tasks. Another approach to explore whether explicit and implicit timing shares the same representation involves examining transfer of training between timing tasks. A previous study demonstrated that training on a time discrimination task showed significant transfer to a time production task (Meegan et al. 2000). They suggested that temporal representations for perceptual judgment and motor control, although anatomically distinct, are located more proximally (e.g., adjacent regions of the cerebellum). To date, it has not been clear how training would transfer between explicit and implicit timing tasks. In this study, we did not examine whether training on the RT task transfers to such explicit timing tasks. It might be possible to estimate the Weber fraction by having participants perform an interval discrimination or reproduction task before and after training on the RT task, in order to evaluate a training effect. However, it should be noted that previous studies have shown that pretraining practice on explicit timing tasks on the first day of training leads to a large reduction in the Weber fraction. This indicates that training on an explicit timing task might interfere with subsequent training on the RT task. Further study is needed to examine whether improvement in timing with training on a RT task could be generalized to time discrimination and production, finger-tapping, and circle-drawing tasks. We suspect that training would lead to an improvement in perceptual and motor timing for a range of intervals used on a variable foreperiod.
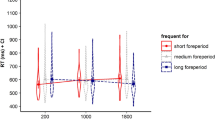
Estimation of elapsed time and internal representation of foreperiod distribution
In this study, we assumed that participants’ estimates of elapsed time would follow Weber’s law. Under this assumption, we predicted the probabilistic distribution of the foreperiod that the participant experienced during training. The predicted foreperiod distribution increased gradually, peaked around the middle of the rectangular distribution, and decreased with longer foreperiods. A previous study examined how participants represented a rectangular foreperiod distribution (Näätänen and Merisalo 1977). In their study, three foreperiods were used, which could not be easily discriminated due to the small differences in their duration (i.e., 1.75, 2.0, and 2.25 s). The task required participants to judge which of the three foreperiods—short, medium, long—was used during a trial. Participants’ judgment of the foreperiod duration did not follow a rectangular foreperiod distribution. Rather, the foreperiod distribution was biased such that the subjective frequency of the medium foreperiod was remarkably increased and comparable to the waveform of our predicted foreperiod distribution. This suggests that in the present study participants might have also experienced the foreperiod distribution in a way that was mathematically predicted by assuming Weber’s law. Näätänen and Merisalo demonstrated that RT was steeply inverted when plotted as a function of the subjective estimate of foreperiod rather than of the objective foreperiod.
We also demonstrated an inverse relationship between subjective estimates of hazard rate and RTs. We blurred the foreperiod distribution with a Gaussian distribution and obtained the subjective hazard rate, which increased monotonically with the foreperiod. If the foreperiod distribution were blurred by some positively skewed distribution (e.g., Wald, Gamma, or lognormal), then the subjective hazard rate would have shown an asymptotic or peaked curve. Therefore, the RT data would be fit better with the subjective hazard rate used in our study. The participants’ internal representations of the temporal structure of the task and the behavioral consequences were explained by assuming Weber’s law for time. Our results suggest that the brain may reduce the uncertainty associated with estimating time to infer the temporal structure of the environment and adapt timing behaviors accordingly.
References
Bartolo R, Merchant H (2009) Learning and generalization of time production in humans: rules of transfer across modalities and interval durations. Exp Brain Res 197:91–100
Brody CD, Hernandez A, Zainos A, Romo R (2003) Timing and neural encoding of somatosensory parametric working memory in macaque prefrontal cortex. Cereb Cortex 13:1196–1207
Buhusi CV, Meck WH (2005) What makes us tick? Functional and neural mechanisms of interval timing. Nat Rev Neurosci 6:755–765
Coull JT, Nobre AC (2008) Dissociating explicit timing from temporal expectation with fMRI. Curr Opin Neurobiol 18:137–144
Cui X, Stetson C, Montague PR, Eagleman DM (2009) Ready…go: amplitude of the fMRI signal encodes expectation of cue arrival time. PLoS Biol 7:e1000167
Drazin DH (1961) Effects of foreperiod, foreperiod variability, and probability of stimulus occurrence on simple reaction time. J Exp Psychol 62:43–50
Durstewitz D (2003) Self-organizing neural integrator predicts interval times through climbing activity. J Neurosci 23:5342–5353
Eagleman DM, Tse PU, Buonomano D, Janssen P, Nobre AC, Holcombe AO (2005) Time and the brain: how subjective time relates to neural time. J Neurosci 25:10369–10371
Elithorn A, Lawrence C (1955) Central inhibition—some refractory observations. Q J Exp Psychol 7:116–127
Fischer B, Rogal L (1986) Eye-hand-coordination in man: a reaction time study. Biol Cybern 55:253–261
Gallistel CR, Gibbon J (2000) Time, rate, and conditioning. Psychol Rev 107:289–344
Gibbon J (1977) Scalar expectancy theory and Weber’s law in animal timing. Psychol Rev 84:279–325
Gibbon J, Malapani C, Dale CL, Gallistel C (1997) Toward a neurobiology of temporal cognition: advances and challenges. Curr Opin Neurobiol 7:170–184
Gorbet DJ, Sergio LE (2009) The behavioural consequences of dissociating the spatial directions of eye and arm movements. Brain Res 1284:77–88
Hoffman DS, Strick PL (1986) Step-tracking movements of the wrist in humans. I. Kinematic analysis. J Neurosci 6:3309–3318
Hoffman DS, Strick PL (1999) Step-tracking movements of the wrist. IV. Muscle activity associated with movements in different directions. J Neurophysiol 81:319–333
Ivry RB (1996) The representation of temporal information in perception and motor control. Curr Opin Neurobiol 6:851–857
Janssen P, Shadlen MN (2005) A representation of the hazard rate of elapsed time in macaque area LIP. Nat Neurosci 8:234–241
Kakei S, Hoffman DS, Strick PL (1999) Muscle and movement representations in the primary motor cortex. Science 285:2136–2139
Karlin L (1959) Reaction time as function of foreperiod duration and variability. J Exp Psychol 58:185–191
Karmarkar UR, Buonomano DV (2003) Temporal specificity of perceptual learning in an auditory discrimination task. Learn Mem 10:141–147
Klemmer ET (1956) Time uncertainty in simple reaction time. J Exp Psychol 51:179–184
Komura Y, Tamura R, Uwano T, Nishijo H, Kaga K, Ono T (2001) Retrospective and prospective coding for predicted reward in the sensory thalamus. Nature 412:546–549
Leon MI, Shadlen MN (2003) Representation of time by neurons in the posterior parietal cortex of the macaque. Neuron 38:317–327
Lewis PA, Miall RC (2003) Distinct systems for automatic and cognitively controlled time measurement: evidence from neuroimaging. Curr Opin Neurobiol 13:250–255
Loveless NE (1973) The contingent negative variation related to preparatory set in a reaction time situation with variable foreperiod. Electroencephalogr Clin Neurophysiol 35:369–374
Luce RD (1986) Response times: their role in inferring elementary mental organization. Oxford University Press, New York
Macar F, Vidal F, Casini L (1999) The supplementary motor area in motor and sensory timing: evidence from slow brain potential changes. Exp Brain Res 125:271–280
MacDonald CJ, Meck WH (2006) Interaction of raclopride and preparatory interval effects on simple reaction time performance. Behav Brain Res 175:62–74
Mauk MD, Buonomano DV (2004) The neural basis of temporal processing. Annu Rev Neurosci 27:307–340
Mauritz KH, Wise SP (1986) Premotor cortex of the rhesus monkey: neuronal activity in anticipation of predictable environmental events. Exp Brain Res 61:229–244
Meegan DV, Aslin RN, Jacobs RA (2000) Motor timing learned without motor training. Nat Neurosci 3:860–862
Merchant H, Zarco W, Bartolo R, Prado L (2008) The context of temporal processing is represented in the multidimensional relationships between timing tasks. PLoS One 3:e3169
Mita A, Mushiake H, Shima K, Matsuzaka Y, Tanji J (2009) Interval time coding by neurons in the presupplementary and supplementary motor areas. Nat Neurosci 12:502–507
Näätänen R, Merisalo A (1977) Expectancy and preparation in simple reaction time. In: Dornic S (ed) Attention and performance VI. Lawrence Erlbaum, Hillsdale, pp 115–138
Nagarajan SS, Blake DT, Wright BA, Byl N, Merzenich MM (1998) Practice-related improvements in somatosensory interval discrimination are temporally specific but generalize across skin location, hemisphere, and modality. J Neurosci 18:1559–1570
Niemi P, Näätänen R (1981) Foreperiod and simple reaction time. Psychol Bull 89:133–162
Niki H, Watanabe M (1979) Prefrontal and cingulate unit activity during timing behavior in the monkey. Brain Res 171:213–224
Nobre AC, Correa A, Coull JT (2007) The hazards of time. Curr Opin Neurobiol 17:465–470
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9:97–113
Oswal A, Ogden M, Carpenter RHS (2007) The time course of stimulus expectation in a saccadic decision task. J Neurophysiol 97:2722–2730
Polzella DJ, Ramsey EG, Bower SM (1989) The effects of brief variable foreperiods on simple reaction time. Bull Psychon Soc 27:467–469
Praamstra P, Kourtis D, Kwok HF, Oostenveld R (2006) Neurophysiology of implicit timing in serial choice reaction-time performance. J Neurosci 26:5448–5455
Requin J, Granjon M (1969) The effect of conditional probability of the response signal on the simple reaction time. Acta Psychol (Amst) 31:129–144
Reutimann J, Yakovlev V, Fusi S, Senn W (2004) Climbing neuronal activity as an event-based cortical representation of time. J Neurosci 24:3295–3303
Riehle A, Grun S, Diesmann M, Aertsen A (1997) Spike synchronization and rate modulation differentially involved in motor cortical function. Science 278:1950–1953
Rosenbaum DA (1980) Human movement initiation: specification of arm, direction, and extent. J Exp Psychol Gen 109:444–474
Ruchkin DS, McCalley MG, Glaser EM (1977) Event related potentials and time estimation. Psychophysiology 14:451–455
Trillenberg P, Verleger R, Wascher E, Wauschkuhn B, Wessel K (2000) CNV and temporal uncertainty with ‘ageing’ and ‘non-ageing’ S1–S2 intervals. Clin Neurophysiol 111:1216–1226
Tsunoda Y, Kakei S (2008) Reaction time changes with the hazard rate for a behaviorally relevant event when monkeys perform a delayed wrist movement task. Neurosci Lett 433:152–157
Walter WG, Cooper R, Aldridge VJ, Mccallum WC, Winter AL (1964) Contingent negative variation: an electric sign of sensorimotor association and expectancy in the human brain. Nature 203:380–384
Westheimer G (1999) Discrimination of short time intervals by the human observer. Exp Brain Res 129:121–126
Wright BA, Buonomano DV, Mahncke HW, Merzenich MM (1997) Learning and generalization of auditory temporal-interval discrimination in humans. J Neurosci 17:3956–3963
Yamamoto K, Hoffman DS, Strick PL (2006) Rapid and long-lasting plasticity of input-output mapping. J Neurophysiol 96:2797–2801
Zelaznik HN, Spencer RM, Ivry RB (2002) Dissociation of explicit and implicit timing in repetitive tapping and drawing movements. J Exp Psychol Hum Percept Perform 28:575–588
Acknowledgments
We thank Drs. Jongho Lee and Saeka Tomatsu for valuable comments. We are also grateful to Drs. Michael Shadlen, Masaaki Doi, Akitoshi Ogawa, Tung Le, and Nobuto Takeuchi for thoughtful discussions. This work was supported by KAKENHI (#16015212 to SK).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Tsunoda, Y., Kakei, S. Anticipation of future events improves the ability to estimate elapsed time. Exp Brain Res 214, 323–334 (2011). https://doi.org/10.1007/s00221-011-2821-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-011-2821-x