
Abstract
Grasshoppers and crickets independently evolved hearing organs and acoustic communication. They differ considerably in the organization of their auditory pathways, and the complexity of their songs, which are essential for mate attraction. Recent approaches aimed at describing the behavioral preference functions of females in both taxa by a simple modeling framework. The basic structure of the model consists of three processing steps: (1) feature extraction with a bank of ‘LN models’—each containing a linear filter followed by a nonlinearity, (2) temporal integration, and (3) linear combination. The specific properties of the filters and nonlinearities were determined using a genetic learning algorithm trained on a large set of different song features and the corresponding behavioral response scores. The model showed an excellent prediction of the behavioral responses to the tested songs. Most remarkably, in both taxa the genetic algorithm found Gabor-like functions as the optimal filter shapes. By slight modifications of Gabor filters several types of preference functions could be modeled, which are observed in different cricket species. Furthermore, this model was able to explain several so far enigmatic results in grasshoppers. The computational approach offered a remarkably simple framework that can account for phenotypically rather different preference functions across several taxa.
Similar content being viewed by others


Introduction to acoustic communication in crickets and grasshoppers
Many Orthopteran species use acoustic signals for intraspecific communication to attract or to approach potential mating partners. In crickets only the males sing, and a female inclined to mate makes a phonotactic approach toward the singing male. This basic scenario of communication is also found in many grasshoppers. In some grasshopper species, however, females respond to a singing male with a song of their own, and then males show phonotaxis toward the responding female. Crickets and grasshoppers are taxa that diverged more than 200,000,000 years ago (Flook and Rowell 1997) and obviously evolved their hearing capabilities independently (for reviews see Stumpner and von Helversen 2001; Hennig et al. 2004; Strauß and Lakes-Harlan 2014; Strauß and Stumpner, this volume). The ears are located in different segments, in the forelegs and in the first abdominal segment. Correspondingly the neurons of the first processing stages reside in different ganglia. Even Tettigoniids and Gryllids probably evolved hearing organs independently, in spite of their similar location (Strauß and Lakes-Harlan 2014). For sound localization and directional hearing, grasshoppers and crickets have developed pressure-difference receivers but again with different anatomical realizations (Michelsen et al. 1994; von Helversen 1997; Michelsen 1998).
Songs of crickets normally consist of sound pulses with a relatively pure-tone carrier. Sound pulses are produced as continuous trills or as shorter chirps separated by longer intervals. The carrier frequencies of different field cricket species are often around 3–6 kHz, whereas the species-specificity lies in the temporal pattern of pulses (Alexander 1962; Hennig et al. 2004). Grasshopper songs possess normally broadband carrier frequencies, covering ranges from 1–2 kHz up to >40 kHz (e.g. Meyer and Elsner 1996). Songs of different species show a variety of amplitude modulation patterns, ranging from repetitions of simple sound pulses to highly complex songs that may last for several minutes and exhibit series of different song elements (e.g., Elsner and Popov 1978; von Helversen 1986; Stumpner and von Helversen 1994; Elsner and Wasser 1995). In both taxa, however, the species-specific pattern of amplitude modulations, i.e., the sound envelope, provides the most crucial cues for song recognition and the species-specific preference functions (von Helversen and von Helversen 1997, 1998; Gerhardt and Huber 2002; Hennig et al. 2004; Hoy et al. 1998).
Using song models in which one can control different features, it is possible to determine which temporal cues the animals use for song recognition and what makes a song attractive. Such experiments have been performed in several species, by observing phonotactic decisions of female crickets or the response songs of grasshopper females as indicators of song attractiveness. Females of different cricket species show clear preferences for certain pulse periods and duty cycles, sometimes in combination with preferences for chirp periods at much longer time scales (Grobe et al. 2012; Rothbart and Hennig 2012; for katydids see Deily and Schul 2009). The preference functions of female grasshoppers have been investigated in great detail for several species, mostly of the genus Chorthippus (von Helversen 1972, 1986; von Helversen and von Helversen 1994, 1997; Stumpner and von Helversen 1992, 1994; Gottsberger and Mayer 2007)—here we focus on C. biguttulus.
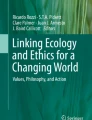
A most conspicuous feature of Orthopteran songs is their repetitive structure. In songs of different species some tens up to hundreds of stereotyped subunits are strung together (Fig. 1a). If one determines the Fourier components of the song envelope, this repetitive song structure manifests itself in a series of prominent frequency peaks and the basic song structure can well be approximated using a small number of Fourier components (4–5 in the example of Fig. 1b). Thus, it has been suggested that crickets and grasshoppers may process the songs in the frequency domain, ignoring the phase information of the Fourier components (for a similar discussion in the domain of vision see Daugman 1985). Whereas in some katydids an analysis of songs within the spectral domain may suffice for recognition (see Bush et al. 2009), this type of processing is, however, not realized in crickets and grasshoppers: behavioral tests on crickets (Gryllus bimaculatus) and grasshoppers (Chorthippus biguttulus) provided evidence that the song envelopes are processed in the time domain (Hennig 2009; von Helversen and von Helversen 1998; Schmidt et al. 2008). Hence our search focuses on neuronal circuits that measure syllable and pause durations in the time domain (Balakrishnan et al. 2001).

a Song structure of Chorthippus biguttulus. Oscillogram of a song segment, its envelope, and a ‘syllable-pause’ song model as used in behavioral tests. b Fourier amplitude spectrum of the song envelope shown in a. c Structure of the computational model for song recognition. Feature detectors consist of LN models with a linear filter and a sigmoidal non-linearity. The output of each feature detector is integrated over a given time window, and the resulting feature values are weighted and combined to yield a prediction of the behavioral response for a given song; c from Clemens and Ronacher (2013)
There is evidence that the final decision of whether or not an acoustic signal is attractive for a female occurs in the brain. In the brain of crickets, several neurons are known that show band-pass filter properties with respect to the species-specific pulse pattern (Schildberger 1984; Zorović and Hedwig 2011; Kostarakos and Hedwig 2012). In addition, command neurons for the song production also originate in the brain and descend from there to the central pattern generator (CPG) for song, which is located in the thoracic and abdominal ganglia (Hedwig 2000; Schöneich 2012). Behavioral evidence after lesions and after selective heating of the head ganglia in grasshoppers likewise suggests that the final decision about signal attractiveness occurs in the brain (Ronacher et al. 1986; Bauer and von Helversen 1987). Command neurons that descend from the brain to the thoracic song CPG have been described for grasshoppers as well (Hedwig 1994). However, grasshoppers and crickets differ substantially in the neural substrates of their auditory pathways, which provide the input to the brain’s decision centers.
Principle organization of the auditory pathways in crickets and grasshoppers
Crickets
Most auditory receptor neurons are tuned to the calling song frequency, while only few sensory neurons cover the ultrasonic range for bat detection (Imaizumi and Pollack 2005). The receptor neurons project to a central auditory neuropile within the prothoracic ganglion from which several interneurons receive sensory input (Eibl and Huber 1979; Wohlers and Huber 1982). However, only few auditory interneurons appear to be relevant in the context of acoustic communication (Schildberger and Hörner 1988): a local omega-shaped interneuron (ON1) that mediates a contrast enhancement for directional hearing and two ascending interneurons (AN1, AN2). These two neurons are dedicated in a categorical way to different functions and are tuned to different frequency ranges: AN1 to low frequencies around 5 kHz relevant for the detection of conspecific signals, whereas AN2 responds to high-frequency sounds (>15 kHz), e.g., bat calls, and spike bursts of this neuron induce avoiding responses (e.g., Hoy 1989; Wyttenbach et al. 1996; Marsat and Pollack 2006). While the burst coding of AN2 suggests feature extraction of bat calls at the prothoracic level, the temporal cues of the conspecific song pattern are processed at the next level in the brain (Schildberger 1984; Kostarakos and Hedwig 2012). Remarkably, for some katydids a similar layout is observed at the prothoracic level (Tettigoniidae: Schul 1997; Triblehorn and Schul 2009), whereas in the Phaneropterinae more ascending neurons have been described which seems to correlate with a more complex communication in this group; see Stumpner and Nowotny (2014).
Grasshoppers
40–80 auditory sensory neurons originate in each of the tympanal organs, located in the first abdominal segment. The majority of sensory neurons is tuned to the low-frequency range around 3–7 kHz, only a smaller group preferentially responds to high frequencies (15 kHz up to >40 kHz: Römer 1976; Silver et al. 1980; Jacobs et al. 1999). The sensory axons enter the metathoracic ganglion complex where they synapse onto auditory interneurons that form a dense auditory neuropil which harbors a first important processing module. Several types of local neurons have been described; some of them exist as twins or triplets (Römer and Marquart 1984; Stumpner 1988; Stumpner and Ronacher 1991, 1994; Stumpner et al. 1991; Boyan 1992, 1999). Local neurons perform first processing steps and then transmit their messages to a rather large number of ascending neurons (so far around 15–20 different types have been identified, see Römer and Marquart 1984; Stumpner 1988; Stumpner and Ronacher 1991, 1994). The ascending neurons show different responses, ranging from tonic to phasic spiking and various combinations of excitation and inhibition, thus responding more diversely to specific acoustic features than sensory neurons and local neurons (Stumpner et al. 1991; Vogel et al. 2005; Wohlgemuth and Ronacher 2007; Creutzig et al. 2010; Wohlgemuth et al. 2011). There is a tendency that ascending neurons respond temporally sparse, and that also the population sparseness increases from local to ascending neurons (Clemens et al. 2012). Thus a change of coding principles from a summed population code to a labeled line population code seems to occur rather early in the auditory pathway of grasshoppers, at the transition between local and ascending neurons (Creutzig et al. 2010; Clemens et al. 2011). The large number of ascending auditory neurons in grasshoppers as well as the diversity of their feature selectivity is in stark contrast to crickets where only two types of ascending neurons have been described (AN1, AN2) (Wohlers and Huber 1982; see also Kostarakos and Hedwig 2012; Ronacher 2014).
Behavioral preference functions are well described by a relatively simple modeling framework
The previous paragraph left us with the main message that the peripheral auditory pathways are rather differently organized between crickets and grasshoppers regarding the number of elements and their physiological properties. It was therefore surprising that models for song recognition with similar properties were able to efficiently describe and predict the behavioral responses in these two distantly related taxa.
The basic structure of the model consists of three processing steps: (1) feature extraction, (2) temporal integration and (3) linear combination (Fig. 1c). Feature extraction is implemented with a bank of ‘LN models’—each containing a linear filter element followed by a nonlinearity. The linear filter responds to specific temporal features of the sound envelope pattern—it hence acts as a template that is compared to the stimulus. The nonlinearity is equivalent to the input–output-function of a neuron.
The way a linear filter works is demonstrated schematically in Fig. 2. The filter is shifted along the stimulus from left to right (Fig. 2a). At each point in time, the filter is multiplied with the current stimulus (1–4 in Fig. 2a) and the point-wise product of filter and stimulus is summed to yield the filter output (colored circles). The filter output thus reflects the similarity between the current stimulus history and the template. A filter with a positive lobe combined with a negative lobe is a differentiating (or band-pass) filter and constitutes an offset detector. It responds strongly to transients (segments 2 and 4 in Fig. 2a); it does not respond to constant stimuli (1 and 3) and hence does not reflect stimulus level: segments 1 and 3 have different levels but yield the same, zero output. This is because the positive and negative values in the product between stimulus and filter cancel each other in the sum. Offsets (negative slopes in the stimulus) evoke positive responses; onsets (positive slopes) yield negative responses since the higher level matches the negative part of the filter (2 in Fig. 2a). A filter with a negative slope combined with a positive slope responds preferentially to onset transients in the stimulus (Fig. 2b: the output is positive for onsets and negative for offsets). A filter with a single, positive lobe acts as a low-pass filter—it smoothens the stimulus and encodes the stimulus level (Fig. 2c).

Principle of linear filtering by cross correlation; explanation in text
The nonlinearity (see Fig. 1c) then transforms the filter output; this step can be imagined as translating a graded membrane potential into the cell’s spiking output. A particularly interesting aspect of the model is the integration step. The model performs a long-term temporal integration of the output of each feature detector, yielding a single feature value α i for each feature detector (i = 1, 2, 3). These feature values α i are then attributed with specific weight factors and linearly combined, yielding a prediction of the behavioral response for a given song. Notably, the duration of the linear filters does not need to exceed 64 ms.
It should be emphasized that—apart from the model’s basic structure—no additional prior assumptions were made. The optimal shapes of the filters and corresponding nonlinearities as well as the weight factors were found by a genetic learning algorithm (Mitchell 1998; Clemens and Ronacher 2013; Clemens and Hennig 2013). The algorithm started from a randomly chosen set of 500 solutions and those solutions that provided a better prediction for the measured behavioral responses had a higher chance to be propagated to the next generation of models. The model started from various sets of random filter components and found the optimal feature detectors by training the genetic algorithm on a large set of behavioral data and the respective stimulus envelopes. For training only part of the data set was used and the model’s performance was then tested with the remaining data (leave-one-out cross-validation; for details see Clemens and Hennig 2013; Clemens and Ronacher 2013). Remarkably, a model with only two feature detectors performed very well (Clemens and Ronacher 2013).
The effects of filters and nonlinearities will now be exemplified with the grasshopper model, on the basis of some typical model song features (Fig. 3). Figure 3a shows the shapes of the two filters, which resemble Gabor filters (see below). In Fig. 3b these two filters act on a song model with a syllable-pause and a pronounced accentuation at the syllable onset (compare Fig. 1a); the filter response is shown in the lower two traces. Both filters react with a positive lobe at the two stimulus’ offsets. However, with the green filter the second positive lobe is smaller. The nonlinearities in Fig. 3c are very steep and similar, only slightly shifted on the x-axis. The nonlinearities cut off all negative and part of the positive values and let pass only large positive values, producing an almost binary response (Fig. 3d). The temporal integration computes an average of the traces in Fig. 3d, yielding two numbers (f 1 = 0.26, f 2 = 0.17) as outputs of the respective feature detectors. f 1 and f 2 are then combined, with proper weights, yielding the model’s prediction of the behavioral response. Note that the second (green) filter has a negative weight (see inset in Fig. 3f). The combined performance of the model is extremely high, explaining 87 % of the behavioral variance (Fig. 3f, r 2 = 0.87).

Properties of the model for grasshoppers. a Filter shapes for both feature detectors (red and green). Filters are scaled to have a vector norm of 1.0 and hence have arbitrary units. b Top example stimulus (black) with 12 ms pause duration, 12 dB onset accentuation and 18 dB offset (horizontal black line indicates 0 dB). Red and green traces show this stimulus filtered by the red and green filters from a; arrows indicate responses to onsets (upward facing arrows) and offsets (downward facing arrows). For the analysis the whole stimulus set was normalized to zero mean and unit variance. c Nonlinearities of the feature detectors that transform the output of the respective filters. Shaded areas show the distributions of output values of the filters for all stimuli. d The two filtered traces from b after applying the nonlinearities. The numbers f 1 , f 2 indicate the feature values resulting from the temporal integration. e Feature values of the two detectors plotted separately against the behavioral responses. Small dots correspond to different stimuli. Large black dots indicate the feature values for the stimulus shown in b. f Correlation between behavioral scores and model predictions obtained by linear combination of weighted feature values (see formula in inset, f 1, f 2 feature values of filter 1 and 2, respectively; note that the weight of feature 2 has a negative sign). Modified from Clemens and Ronacher (2013)
In Fig. 4 the model’s responses to a standard song pattern with varying pause durations are exemplified. C. biguttulus females exhibit a band-pass-like preference function to variation of this parameter with a peak around 18 ms (Fig. 4e). The plots in Fig. 4a–c demonstrate how this band-pass is realized in the model. With a very short (4-ms) pause both filters show a weak and similar response (Fig. 4b, c). With a preferred pause (18 ms), the red filter produces two positive lobes that exceed the nonlinearity’s threshold, whereas the green filter responds only to the larger offset at the syllable’s end. However, if the pause becomes longer (here 50 ms), the green filter output stays high during the pause, whereas the red filter still produces two shorter positive bumps (in response to the offset and the next onset). In Fig. 4d, the output of the two filters is plotted against pause duration. The green curve resembles a high-pass for pause duration, while the red curve shows weak band-pass properties. Its slow decline for very long pauses is due to the fact that with increasing pause duration the off- and onsets of syllables occur more rarely (see numbers in Fig. 4c). The combination of the two filter outputs—green has a negative weight—now reproduces well the band-pass-like preference function of behaving females (Fig. 4d, e). A further interesting result was found with respect to the gap detection of C. biguttulus: females of this species reject songs with syllables that are interrupted by tiny gaps, if the gaps are longer than about 3 ms (von Helversen 1972; Ronacher and Stumpner 1988). Although there was no specific training to this type of stimuli and the 64-ms filter was long compared to the gaps to be resolved, the model also reproduced this specific gap rejection rather well (see Fig. 4f).

Model responses to variation of pause and gap duration. a Stimulus envelopes (block stimuli with 80-ms syllable duration and 4-, 18- or 50-ms pauses. Filter responses (b) and after nonlinearity (c); time averaged feature values are shown on the right of each trace in c; the time shift between the filter responses has been neglected in b and c, since it becomes irrelevant after the temporal integration step. d Normalized feature outputs; the excitatory feature (red) had band-pass properties for pause duration, with a steep rise for short and a shallow roll-off for long pauses. The suppressive feature (green) was a high-pass, and the combination yielded a sharp band-pass tuned to pauses around 18 ms, which corresponds well to the behavioral data (e). f The model with the same properties also reproduced the gap detection behavior of C. biguttulus females—they reject songs whose syllables are interrupted by small gaps (see insets in f). Further details in text; modified from Clemens and Ronacher (2013)
Figure 5 shows the model features for two species of crickets (upper row: Gryllus bimaculatus; lower row: G. locorojo). The respective filters are shown in red and blue, blue being assigned with a negative weight. The nonlinearities are less steep than in the grasshopper model, but still transform the output of the LN-model into a binary-like signal (Fig. 5f for G. bimaculatus). Figure 5c shows the response of the two detectors to variation of the pulse period of song models. The red filter responded best to periods of 30–40 ms, which corresponds to the fact that the sinusoidal filter covered approximately 2 periods per 64 ms. The blue filter exhibited roughly one period per 64 ms and responded to longer periods or longer pauses before a pulse (>60 ms Fig. 5c). Since this detector carried a negative weight it induced a stronger roll-off of the preference function at long periods (compare Fig. 5c and d, upper panel). For the other species (Fig. 5, lower row), the two filters were more similar and exhibited a sinusoidal shape. The second (blue) filter exhibited a higher modulation frequency and correspondingly preferred shorter pulse periods (Fig. 5c, bottom panel); its suppressive influence thus shifted the peak of the preference function to somewhat higher periods (Fig. 5d).

Model properties for two cricket species [Gryllus bimaculatus (top row)] and G. locorojo (bottom row). a Shape of the filters associated with the two feature detectors (red and blue). Filters are scaled to have a vector norm of 1.0 and hence have arbitrary units. b Corresponding nonlinearities. c Transfer functions for pulse period of the feature values associated with each filter (feature values were normalized to a range between 0 and 1). The blue filters had a negative weight. Pulse duty cycle was 0.5. d, e Comparison of phonotaxis behavior and model predictions. Weights for combining the feature values were 2.38 and −1.89 for G. bimaculatus and 11.45 and −9.3 for G. locorojo. f Filter responses of the G. bimaculatus model to a 5-pulse chirp (top trace), and the output of the nonlinearities, lowest traces; from Clemens and Hennig (2013)
Similar model features in crickets and grasshoppers
Most remarkably, although the model’s solutions were found independently for grasshoppers and crickets, they exhibit several interesting similarities: First, a set of only two feature detectors sufficed to yield very good predictions of the behavioral data (r 2 ranged from 0.67 and 0.75 for two Gryllus species to 0.87 for the grasshopper C. biguttulus, Figs. 5e, 3f). Including a third feature detector improved the model’s predictive power only marginally, both in the grasshopper and in the crickets (Clemens and Ronacher 2013; Clemens and Hennig 2013). The linear filters used for the model were short compared with the chirp or song duration, 64 ms for crickets and grasshoppers, but even shorter filters (>35 ms) yielded a comparable model performance in the grasshopper (Clemens and Ronacher 2013)—for effects of filter duration in crickets see below and Fig. 6a–c. In both taxa the output of one detector with positive weight was combined with a negative weight of the other detector, yielding the typical species-specific band-pass preference functions (Figs. 3, 4, 5). A possible scenario for the implementation of the weighting function in a neuronal network would be given by the convergence of an excitatory pathway with an inhibitory input (compare Fig. 6e–h). Recently, brain neurons have been described in G. bimaculatus that exhibit specific interactions of inhibitory and excitatory inputs, leading to a tuning of the neuron’s spike response for pulse periods that closely resembles the behavioral preference function of females of this species (Kostarakos and Hedwig 2012). Thus, these neurons (in particular B-LI4) may represent the output stage of the model shown in Fig. 1c. It would be very interesting to further characterize the input to, e.g., B-LI4 to see whether these upstream neurons exhibit Gabor filter-like properties. Also in Drosophila, two classes of brain interneurons have recently been investigated that are essential for the behavioral response to courtship song. Remarkably, one neuron class, being GABAergic, obviously represents an inhibitory pathway essential for the behavioral tuning (Vaughan et al. 2014).

Properties of Gabor filters can explain the profiles of different known preference functions. a–c The width of a Gabor function (color coded in red hues, filter pictograms shown to the right of c) affects the tuning for pulse period (a, c), pulse duty cycle (b) as well as resonant properties (a, c). d Tuning derived from a long filter (100 ms) with resonant peaks at multiples of the preferred period (20 ms, vertical/diagonal lines denote transects shown in c and a). For color code refer to color bar to the right of l. e–l Different combinations of excitation and inhibition (e–h, red and blue dashed lines, respectively) give rise to different Gabor functions. No inhibition (e) yields a duty cycle tuning (i). Leading inhibition (f) yields a period tuning. Broad excitation combined with narrow inhibition (g) yields a Mexican-hat-like filter with duration tuning (k). Narrow excitation paired with broad inhibition (h) yields pause tuning (l). For color code refer to color bar to the right of l. (a–d modified from Clemens and Hennig 2013, e–l modified after Hennig et al. 2014)
Second, in both taxa, both or at least one of the optimal filters found by the genetic algorithm resembled Gabor filters, which are widely used in models of the visual and auditory pathways of vertebrates (e.g., Smith and Lewicki 2006; Priebe and Ferster 2012). Gabor filters can be constructed by convolving a sinusoidal modulation with a Gaussian envelope, and have interesting properties. For example, they provide an optimal compromise between the resolution of spatial frequencies and the localization of visual patterns, and the responses of simple cells in the visual cortex of cats strongly resemble two-dimensional Gabor functions (Daugman 1985). If one determines a sparse basis for natural images the resulting basic functions resemble Gabor filters (Olshausen and Field 1996; Bell and Sejnowski 1997). In addition, Gabor filters may confer robustness against noise (Atick and Redlich 1990; Zhao and Zhaoping 2011). Most remarkably, with slight parameter modifications of the Gabor filters several observations on the behavioral preferences in different species of cricket and katydids can be modeled in a straightforward way (see Fig. 6e–l, Hennig et al. 2014).
Third, an exceptional property of the model is its temporal integration step. The model explicitly neglects the temporal position at which certain features occur in the sound stimulus—which appeared rather counter-intuitive given the regularity of natural songs and the fact that the temporal pattern of amplitude modulations is crucial for song acceptance in crickets and grasshoppers (see above). Put in a nutshell, this model assumes that the “What” is important, and not its “When”.
However, it is exactly this temporal integration stage that may explain several observations in crickets and grasshoppers that remained enigmatic in the past. For example, an attractive standard model of a C. biguttulus song consists of thirty to forty 80-ms noise “syllables”, separated by 15-ms pauses (Fig. 1a). However, this regularity is not an essential feature that females require to accept a song: if additional noise syllables of different durations (ranging from 5 to 130 ms) were randomly introduced in the standard song model the irregularity did not abolish its attractiveness (von Helversen and von Helversen 1998). It was even possible to combine two per se essentially not attractive patterns in a song, and this combination boosted the attractiveness to almost normal values (see Fig. 9 in von Helversen and von Helversen 1998). These observations suggest that the females require the presence of certain features in the song’s envelope, but that the exact timing of these features plays a minor role, consistent with the integration step of the model. Similar observations exist in crickets: Teleogryllus females responded well to shuffled patterns provided that these versions contained the three characteristic periods of their normal song, which again fits well to the temporal integration property of the model (Pollack and Hoy 1979; Hennig and Weber 1997).
Gabor functions may represent various preference functions of crickets
The preferences of many cricket (and also Tettigoniid) species can be described in a two-dimensional space spanned by sound pulse duration and pause duration as axes (see Fig. 6). Some species exhibit a band-pass tuning to pause duration, or to a specific pulse duration (Fig. 6k, l), the preference functions of other species are tuned to certain duty cycles or periods (Fig. 6i, j). These behavioral preference functions can be mimicked by small changes in basic parameters of the Gabor filters used by the model (see the corresponding Gabor filters in Fig. 6e–h). The width of the Gabor function determines the sharpness of the pulse period tuning: longer filters result in sharper tuning for pulse period (Fig. 6a, in this example the modulation frequency was 50 Hz, leading to a preferred period of 20 ms). However, filter duration also affects the tuning for duty cycles; here a shorter Gabor filter leads to a narrower tuning (Fig. 6b). Long filters may produce additional peaks at resonant frequencies (Fig. 6a, c, d), which is interesting in view of results that point at resonant properties in katydids’ preference functions (Bush and Schul 2006). The Gabor functions have the additional appeal that they allow for an easy and straightforward implementation in neuronal networks equipped with excitation and inhibition as illustrated in Fig. 6e–h (Hennig et al. 2014).
Thus, this very simple model is able to explain a large variety of preference functions as found in different species of crickets and katydids (Hennig 2003, 2009; Grobe et al. 2012; Schul 1998; Schul et al. 2014). The fact that a transition of one type of preference function to another can be mimicked by small parameter changes of the Gabor filters, which in turn can be implemented by small variations in the relative timing and strength of excitation and inhibition, may help to understand the ease of evolutionary transitions that led to speciation events in crickets and katydids (see, e.g., von Helversen and von Helversen 1994).
Model features specific to grasshoppers
Behavioral tests on grasshoppers have demonstrated a remarkable robustness against different kinds of external (ambient) noise and signal degradation (Ronacher and Krahe 1998; Ronacher et al. 2000; Ronacher and Hoffmann 2003; Einhäupl et al. 2011; Neuhofer et al. 2011). The impact of intrinsic (neuronal) noise, which reveals itself as trial-to-trial variability of neuronal responses, seemed particularly enigmatic, since this variability increased strongly from the periphery to more central processing stages, i.e., in ascending neurons (Vogel et al. 2005; Wohlgemuth and Ronacher 2007; Neuhofer et al. 2011). The model introduced above now offers a potential explanation for several of these observations. First, Gabor filters with positive and negative lobes have band-pass properties and thus convey robustness against noise (Atick and Redlich 1990; Zhao and Zhaoping 2011). Second, ascending neurons exhibit a particularly high trial-to-trial variability and susceptibility to degraded patterns in the timing of spikes, but their spike counts are less susceptible to external signal degradation (Vogel et al. 2005; Neuhofer et al. 2011). However, if down-stream neurons evaluate average spike count over longer time periods as proposed by the model, spike timing variability may not be critical.
The model for the grasshopper revealed another interesting property. When we assessed the correlation with the behavioral data for the two feature detectors separately, one of the two feature detectors showed no correlation with the behavioral responses (r 2 = 0.0) although it contributed substantially to the excellent prediction performance of the complete model (r 2 = 0.87; see Fig. 3e). This finding has implications for neurophysiological experiments, pointing at a weakness of our common approach with single cell recordings: if we focus our search on responses of single neurons that correlate strongly with behaviorally relevant parameters, the contribution of important neurons may not be recognized. Perhaps we must reevaluate the potential contribution to signal recognition of identified neurons that responded to variations of song pattern parameters in a less obvious manner (see Stumpner et al. 1991; Stumpner and Ronacher 1994).
A bottleneck for the information available to the grasshopper’s brain is the set of approximately 20 ascending interneurons (see “Principle organization of the auditory pathways in crickets and grasshoppers”). These neurons probably encode different song features and constitute a labeled line code (Clemens et al. 2011, 2012). However, it may be premature to simply equate single ascending neurons with the filters derived from the model (Figs. 1c, 3a). A filter of the model may well reflect the combined responses of several ascending neurons. A further unexpected result was that the model’s feature detectors responded specifically to offsets in the stimulus envelopes (see Fig. 3), whereas the majority of ascending neurons we recorded from in C. biguttulus or locusts responded to the stimulus onsets (Stumpner et al. 1991). So far, among thoracic neurons, only one local neuron (SN6) is known that responded precisely to offsets and a few ascending neurons that responded less precisely to offsets (Stumpner and Ronacher 1991; Stumpner et al. 1991).
Conclusions
Our modeling approach offers a surprisingly simple framework to explain a variety of phenotypically different preference functions found in different species of crickets, of grasshoppers and likely also of katydids. Transitions between different preference functions can be modeled through small parameter changes of Gabor filters. These, in turn, can be implemented by small variations in the relative timing and strength of excitation and inhibition. This framework thus opens new roads for our understanding of evolutionary transitions that led to speciation events in crickets and katydids (cf. Heller 2006; Schul et al. 2014).
However, still some open questions are left. For example, how does the model cope with more complex songs that are composed of different subunit types, as found, e.g., in the Chorthippus albomarginatus or the C. dorsatus group (von Helversen 1986; Stumpner and von Helversen 1994), and in the genus Teleogryllus (Hennig 2003). Are more or different feature detectors needed to predict the preference functions for these species? A particularly interesting question relates to the bipartite song of C. dorsatus in which the order of two song elements determines attractiveness (Stumpner and von Helversen 1992). Such a comparative investigation, which we now intend, may on the one hand offer a critical test of the model’s generality; on the other hand, it may provide further insights in the evolutionary trajectories leading to species separation.
References
Alexander RD (1962) Evolutionary change in cricket acoustical communication. Evolution 16:443–467
Atick JJ, Redlich AN (1990) Towards a theory of early visual processing. Neural Comput 2:308–320
Balakrishnan R, von Helversen D, von Helversen O (2001) Song pattern recognition in the grasshopper Chorthippus biguttulus: the mechanisms of syllable onset and offset detection. J Comp Physiol A 187:255–264
Bauer M, von Helversen O (1987) Separate localisation of sound recognizing and sound producing neural mechanisms in a grasshopper. J Comp Physiol A 165:687–695
Bell AJ, Sejnowski TJ (1997) The ‘independent components’ of natural scenes are edge filters. Vis Res 37:3327–3338
Boyan GS (1992) Common synaptic drive to segmentally homologous interneurons in the locust. J Comp Neurol 321:544–554
Boyan GS (1999) presynaptic contributions to response shape in an auditory neuron of the grasshopper. J Comp Physiol A 184:279–294
Bush SL, Schul J (2006) Pulse-rate recognition in an insect: evidence of a role for oscillatory neurons. J Comp Physiol A 192:113–121
Bush SL, Beckers OM, Schul J (2009) A complex mechanism of call recognition in the katydid Neoconocephalus affinis (Orthoptera: Tettigoniidae). J Exp Biol 212:648–655
Clemens J, Hennig RM (2013) Computational principles underlying the recognition of acoustic signals in insects. J Comput Neurosci 35:75–85
Clemens J, Ronacher B (2013) Feature extraction and integration underlying perceptual decision making during courtship in grasshoppers. J Neurosci 33:12136–12145
Clemens J, Kutzki O, Ronacher B, Schreiber S, Wohlgemuth S (2011) Efficient transformation of an auditory population code in a small sensory system. Proc Natl Acad Sci USA 108:13812–13817
Clemens J, Wohlgemuth S, Ronacher B (2012) Nonlinear computations underlying temporal and population sparseness in the auditory system of the grasshopper. J Neurosci 32:10053–10062
Creutzig F, Benda J, Wohlgemuth S, Stumpner A, Ronacher B, Herz AVM (2010) Timescale-invariant pattern recognition by feed-forward inhibition and parallel signal processing. Neural Comput 22:1493–1510
Daugman JG (1985) Uncertainty relation for resolution in space, spatial frequency and orientation optimized by two-dimensional visual cortical filters. J Opt Soc Am A: 2:1160–1169
Deily JA, Schul J (2009) Selective phonotaxis in Neoconocephalus nebrascensis (Orthoptera: Tettigoniidae): call recognition at two temporal scales. J Comp Physiol A 195:31–37
Eibl E, Huber F (1979) Central projections of tibial sensory fibers within the three thoracic ganglia of crickets (G. campestris L., G. bimaculatus DeGeer). Zoomorphology 92:1–17
Einhäupl A, Stange N, Hennig RM, Ronacher B (2011) Attractiveness of grasshopper songs correlates with their robustness against noise. Behav Ecol 22(4):791–799
Elsner N, Popov AV (1978) Neuroethology of acoustic communication. Adv Insect Physiol 13:229–355
Elsner N, Wasser G (1995) The transition from leg to wing stridulation in two geographically distinct populations of the grasshopper Stenobothrus rubicundus. Naturwissenschaften 82:384–386
Flook PK, Rowell CHF (1997) The phylogeny of the Caelifera (Insecta, Orthoptera) as deduced from mtrRNA gene sequences. Mol Genet Evol 8:89–103
Gerhardt HC, Huber F (2002) Acoustic communication in insects and anurans. University of Chicago Press, Chicago
Gottsberger B, Mayer F (2007) Behavioral sterility of hybrid males in acoustically communicating grasshoppers. J Comp Physiol A 193:703–714
Grobe B, Rothbart MM, Hanschke A, Hennig RM (2012) Auditory processing at two time scales by the cricket Gryllus bimaculatus. J Expl Biol 215:1681–1690
Hedwig B (1994) A cephalothoracic command system controls stridulation in the acridid grasshopper Omocestus viridulus L. J Neurophysiol 72:2015–2025
Hedwig B (2000) Control of cricket stridulation by a command neuron: efficacy depends on behavioural state. J Neurophysiol 83:712–722
Heller K-G (2006) Song evolution and speciation in bushcrickets. In: Drosopoulos S, Claridge MF (eds) Insect sounds and communication: physiology, behaviour, ecology and evolution. CRC Press, Boca Raton, pp 137–152
Hennig RM (2003) Acoustic feature extraction by cross-correlation in crickets? J Comp Physiol A 189:589–598
Hennig RM (2009) Walking in Fourier’s space: algorithms for the computation of periodicities in song patterns by the cricket Gryllus bimaculatus. J Comp Physiol A 195:971–987
Hennig RM, Weber T (1997) Filtering of temporal parameters of the calling song by cricket females of two closely related species: a behavioral analysis. J Comp Physiol A 180:621–630
Hennig RM, Franz A, Stumpner A (2004) Processing of auditory information in insects. Microsc Res Tech 63:351–374
Hennig RM, Heller K-G, Clemens J (2014) Time and timing in the acoustic recognition system of crickets Front Physiol 5:286. doi:10.3389/fphys.2014.00286
Hoy RR (1989) Startle, categorical response, and attention in acoustic behavior of insects. Ann Rev Neurosci 12:355–375
Hoy RR, Popper AN, Fay RR (eds) (1998) Comparative hearing: insects. Springer, New York
Imaizumi K, Pollack GS (2005) Central projections of auditory receptor neurons of crickets. J Comp Neurol 493:439–447
Jacobs K, Otte B, Lakes-Harlan R (1999) Tympanal receptor cells of Schistocerca gregaria: correlation of soma positions and dendrite attachment sites, central projections and physiologies. J Exp Zool 283:270–285
Kostarakos K, Hedwig B (2012) Calling song recognition in female crickets: temporal tuning of identified brain neurons matches behavior. J Neurosci 32(28):9601–9612
Marsat G, Pollack GS (2006) A behavioural role for feature detection by sensory bursts. J Neurosci 26:10542–10547
Meyer J, Elsner N (1996) How well are frequency sensitivities of grasshopper ears tuned to species-specific song spectra? J Exp Biol 199:1631–1642
Michelsen A (1998) Biophysics of sound localization in insects. In: Hoy RR, Popper AN, Fay RR (eds) Comparative hearing: insects. Springer, Berlin, pp 18–62
Michelsen A, Popov A, Lewis B (1994) Physics of directional hearing in the cricket Gryllus bimaculatus. J Comp Physiol A 175:153–164
Mitchell M (1998) An introduction to genetic algorithms (complex adaptive systems), 3rd edn. MIT, Cambridge
Neuhofer D, Stemmler M, Ronacher B (2011) Neuronal precision and the limits for acoustic signal recognition in a small neuronal network. J Comp Physiol A 197:251–265
Olshausen BA, Field DJ (1996) Emergence of simple-cell receptive field properties by learning a sparse code for natural images. Nature 381:607–609
Pollack GS, Hoy RR (1979) Temporal pattern as a cue for species-specific calling song recognition in crickets. Science 204:429–432
Priebe NJ, Ferster D (2012) Mechanisms of neuronal computation in mammalian visual cortex. Neuron 75:194–208
Römer H (1976) Die Informationsverarbeitung tympanaler Rezeptorelemente von Locusta migratoria. J Comp Physiol A 109:101–122
Römer H, Marquart V (1984) Morphology and physiology of auditory interneurons in the metathoracic ganglion of the locust. J Comp Physiol A 155:249–262
Ronacher B (2014) Processing of species-specific signals in the auditory pathway of grasshoppers. In: Hedwig B (ed) Insect hearing and acoustic communication. Animal signals and communication, vol 1. Springer, Berlin, pp 185–204
Ronacher B, Hoffmann C (2003) Influence of amplitude modulated noise on the recognition of communication signals in the grasshopper Chorthippus biguttulus. J Comp Physiol A 189:419–425
Ronacher B, Krahe R (1998) Song recognition in the grasshopper Chorthippus biguttulus is not impaired by shortening song signals: implications for neuronal encoding. J Comp Physiol A 183:729–735
Ronacher B, Stumpner A (1988) Filtering of behaviourally relevant temporal parameters of a grasshopper’s song by an auditory interneuron. J Comp Physiol A 163:517–523
Ronacher B, von Helversen D, von Helversen O (1986) Routes and stations in the processing of auditory directional information in the CNS of a grasshopper, as revealed by surgical experiments. J Comp Physiol A 158:363–374
Ronacher B, Krahe R, Hennig RM (2000) Effects of signal duration on the recognition of masked communication signals by the grasshopper Chorthippus biguttulus. J Comp Physiol A 186:1065–1072
Rothbart MM, Hennig RM (2012) The Steppengrille (Gryllus spec./assimilis): selective filters and signal mismatch on two time scales. PLoS One 7(9):e43975
Schildberger K (1984) Temporal selectivity of identified auditory neurons in the cricket brain. J Comp Physiol A 155:171–185
Schildberger K, Hörner M (1988) The function of auditory neurons in cricket phonotaxis. I. Influence of hyperpolarization of identified neurons on sound localization. J Comp Physiol A 163:621–631
Schmidt A, Ronacher B, Hennig RM (2008) The role of frequency, phase and time for processing amplitude modulated signals by grasshoppers. J Comp Physiol A 194:221–233
Schöneich S, Hedwig B (2012) Cellular basis for singing motor pattern generation in the field cricket (Gryllus bimaculatus DeGeer). Brain Behav 2(6):707–725
Schul J (1997) Neuronal basis of phonotactic behaviour in Tettigonia viridissima: processing of behaviourally relevant signals by auditory afferents and thoracic interneurons. J Comp Physiol A 180:573–583
Schul J (1998) Song recognition by temporal cues in a group of closely related bushcricket species (genus Tettigonia). J Comp Physiol A 183:401–410
Schul J, Bush S, Frederick KH (2014) Evolution of call patterns and pattern recognition mechanisms in Neoconocephalus katydids. In: Hedwig B (ed) Insect hearing and acoustic communication. Animal signals and communication, vol 1. Springer, Berlin, pp 167–184
Silver S, Kalmring K, Kühne R (1980) The responses of central acoustic and vibratory interneurones in bushcrickets and locusts to ultrasonic stimulation. Physiol Entomol 5:427–435
Smith EC, Lewicki MS (2006) Efficient auditory coding. Nature 439:978–982
Strauß J, Lakes-Harlan R (2014) Evolutionary and phylogenetic origins of tympanal hearing organs in insects. In: Hedwig B (ed) Insect hearing and acoustic communication. Animal signals and communication. vol 1. Springer, Berlin, pp 5–26
Stumpner A (1988) Auditorische thorakale Interneurone von Chorthippus biguttulus L.: Morphologische und physiologische Charakterisierung und Darstellung ihrer Filtereigenschaften für verhaltensrelevante Lautattrappen. PhD thesis, Universität Erlangen-Nürnberg
Stumpner A, Nowotny M (2014) Neural processing in the bush-cricket auditory pathway. In: Hedwig B (ed) Insect hearing and acoustic communication. Animal signals and communication, vol 1. Springer, Berlin, pp 143–166
Stumpner A, Ronacher B (1991) Auditory interneurones in the metathoracic ganglion of the grasshopper Chorthippus biguttulus: I. Morphological and physiological characterization. J Exp Biol 158:391–410
Stumpner A, Ronacher B (1994) Neurophysiological aspects of song pattern recognition and sound localization in grasshoppers. Am Zool 34:696–705
Stumpner A, von Helversen O (1992) Recognition of a two-element song in a grasshopper Chorthippus dorsatus (Orthoptera: Gomphocerinae). J Comp Physiol A 171:405–412
Stumpner A, von Helversen O (1994) Song production and song recognition in a group of sibling grasshopper species (Chorthippus dorsatus, C. dichrous, and C. loratus: Orthoptera, Acrididae). Bioacoustics 6:1–23
Stumpner A, von Helversen D (2001) Evolution and function of auditory systems in insects. Naturwissenschaften 88:159–170
Stumpner A, Ronacher B, von Helversen O (1991) Auditory interneurones in the metathoracic ganglion of the grasshopper Chorthippus biguttulus 2. Processing of temporal patterns of the song of the male. J Exp Biol 158:411–430
Triblehorn JD, Schul J (2009) Sensory-encoding differences contribute to species-specific call recognition mechanisms. J Neurophysiol 102:1348–1357
Vaughan AG, Zhou C, Manoli DS, Baker BS (2014) Neural pathways for the detection and discrimination of conspecific song in D. melanogaster. Curr Biol 24:1039–1049
Vogel A, Hennig RM, Ronacher B (2005) Increase of neuronal response variability at higher processing levels as revealed by simultaneous recordings. J Neurophysiol 93:3548–3559
von Helversen D (1972) Gesang des Männchens und Lautschema des Weibchens bei der Feldheuschrecke Chorthippus biguttulus (Orthoptera, Acrididae). J Comp Physiol 81:381–422
von Helversen O (1986) Gesang und Balz bei Feldheuschrecken der Chorthippus albomarginatus-Gruppe. Zool Jahrb Systematik 113:319–342
von Helversen D (1997) Acoustic communication and orientation in grasshoppers. In: Lehrer M (ed) Orientation and communication in arthropods. Birkhäuser, Basel, pp 301–341
von Helversen O, von Helversen D (1994) Forces driving coevolution of song and song recognition in grasshoppers. In: Schildberger K, Elsner N (eds) Neural basis of behavioural adaptations. G. Fischer, Stuttgart, pp 253–284
von Helversen D, von Helversen O (1997) Recognition of sex in the acoustic communication of the grasshopper Chorthippus biguttulus (Orthoptera, Acrididae). J Comp Physiol A 180:373–386
von Helversen D, von Helversen O (1998) Acoustic pattern recognition in a grasshopper: processing in the frequency or time domain? Biol Cybern 79:467–476
Wohlers DW, Huber F (1982) Processing of sound signals by six types of neurons in the prothoracic ganglion of the crickets Gryllus campestris L. J Comp Physiol 146:161–173
Wohlgemuth S, Ronacher B (2007) Auditory discrimination of amplitude modulations based on metric distances of spike trains. J Neurophysiol 97:3082–3092
Wohlgemuth S, Vogel A, Ronacher B (2011) Encoding of amplitude modulations by auditory neurons of the locust: influence of modulation frequency, rise time, and modulation depth. J Comp Physiol A 197:61–74
Wyttenbach RA, May ML, Hoy RR (1996) Categorical perception of sound frequency by crickets. Science 273:1542–1544
Zhao L, Zhaoping L (2011) Understanding auditory spectro-temporal receptive fields and their changes with input statistics by efficient coding principles. PLoS Comput Biol 7:e1002123
Zorović M, Hedwig B (2011) Processing of species-specific auditory patterns in the cricket brain by ascending, local, and descending neurons during standing and walking. J Neurophysiol 105:2181–2194
Acknowledgments
We thank many members of the Behavioral Physiology lab for sharing their behavioral data, in particular Stefanie Krämer, Olaf Kutzki, and Jana Sträter. This work was funded by grants to BR from the Federal Ministry of Education and Research, Germany (01GQ0410, 01GQ1001A), the Deutsche Forschungsgemeinschaft (SFB618 grants to BR and RMH; Ro 547/12-1; GK1589/1 grant to JC) and the German Academic Exchange Service (JC).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ronacher, B., Hennig, R.M. & Clemens, J. Computational principles underlying recognition of acoustic signals in grasshoppers and crickets. J Comp Physiol A 201, 61–71 (2015). https://doi.org/10.1007/s00359-014-0946-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-014-0946-7